開源智能雙臂協作機器人的計算機軟硬件開發
隨著人工智能和機器人技術的飛速發展,開源智能雙臂協作機器人正逐漸成為工業自動化、醫療輔助和服務領域的關鍵工具。這類機器人不僅具備高度靈活的雙臂協同操作能力,還依托開源平臺,降低了開發門檻,促進了創新。本文將探討開源智能雙臂協作機器人的計算機軟硬件開發,包括其架構、關鍵技術和應用前景。
在硬件開發方面,開源智能雙臂協作機器人通常采用模塊化設計,以確保靈活性和可擴展性。核心硬件包括高性能伺服電機、精密的傳感器(如視覺攝像頭、力/扭矩傳感器和慣性測量單元)、關節執行器以及中央處理單元。這些組件通過標準接口連接,便于用戶根據需求進行定制。例如,使用開源硬件平臺如Arduino或Raspberry Pi作為控制核心,結合ROS(機器人操作系統)兼容的傳感器,可以實現實時數據采集和運動控制。硬件開發還注重輕量化和安全性,例如采用碳纖維材料減輕機械臂重量,并集成碰撞檢測機制以防止意外傷害。
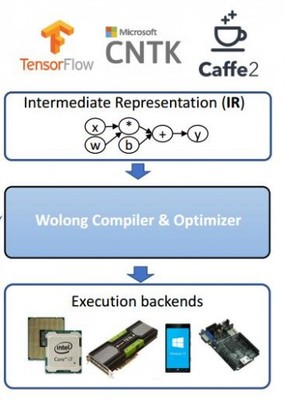
軟件開發是智能雙臂協作機器人的核心,它依賴于開源框架來實現智能化功能。ROS是其中最流行的平臺,提供了一系列庫和工具,用于感知、規劃和控制。在軟件層面,開發包括以下幾個關鍵部分:首先是感知模塊,通過計算機視覺和深度學習算法(如YOLO或OpenCV)識別物體位置和姿態,實現環境交互;其次是運動規劃模塊,利用逆運動學和路徑規劃算法(如RRT或A*)確保雙臂協調運動,避免碰撞;最后是控制模塊,通過PID控制器或更先進的自適應控制方法,實現精準操作。開源社區貢獻了大量代碼庫,例如MoveIt用于運動規劃,Gazebo用于仿真測試,這大大加速了開發進程。
智能雙臂協作機器人的開發還涉及軟硬件集成挑戰。例如,傳感器數據必須實時同步處理,以支持決策制定。開發者需要優化通信協議,如使用ROS 2的DDS(數據分發服務)來提高可靠性和延遲性能。安全性和倫理考慮也不可忽視,軟件中需集成故障檢測和緊急停止機制。
應用前景方面,開源智能雙臂協作機器人已在制造業中用于裝配和包裝,在醫療領域輔助手術,在服務行業提供人機交互。開源模式鼓勵全球開發者協作,不斷推出新功能,推動技術普及。隨著5G和邊緣計算的發展,這類機器人將更智能、更自主。
開源智能雙臂協作機器人的軟硬件開發是一個多學科交叉的領域,結合了機械工程、計算機科學和人工智能。通過開源社區的力量,它不僅降低了成本,還促進了創新,有望在未來社會中發揮更大作用。開發者應持續關注最新技術,積極參與開源項目,以推動這一領域的進步。
如若轉載,請注明出處:http://www.lhjpjq.cn/product/23.html
更新時間:2026-01-07 03:04:08